Was sind autonome mobile Roboter?
Lager, Logistikunternehmen, Agrarunternehmen und Gesundheitseinrichtungen suchen alle nach neuen, innovativen Wegen zur Verbesserung der betrieblichen Effizienz und Geschwindigkeit, zur Gewährleistung von Präzision und zur Verbesserung der Sicherheit. Viele greifen in diesen Bereichen auf autonome mobile Roboter (AMRs) zu.
Ein autonomer mobiler Roboter ist eine Art Roboter, der seine Umgebung erfassen und sich unabhängig durch diese Umgebung bewegen kann. AMR unterscheiden sich von ihren Vorgängern, den autonomen gesteuerten Fahrzeugen (AGV), da letztere auf Schienen oder festen Spuren laufen und häufig von Bedienern überwacht werden müssen.
AMR verwenden einen fortschrittlichen Satz von Sensoren, künstliche Intelligenz, maschinelles Lernen und einen Rechner zur Wegplanung, um ihre Umgebung zu erfassen und sich frei von allen Kabeln durch diese Umgebung zu bewegen. Da AMRs mit Kameras und Sensoren ausgestattet sind, setzen sie bei der Navigation Techniken zur Vermeidung von Hindernissen ein, so z. B. wenn sie auf ein unerwartetes Hindernis wie einen heruntergefallenen Karton oder eine Menschenansammlung treffen. In dem Fall drosselt der Roboter die Geschwindigkeit, kommt zum Stopp oder wählt einen alternativen Weg, um das Objekt zu umgehen und seine Aufgabe fortzusetzen.
Autonome mobile Roboterkomponenten und -architektur
In dem unten gezeigten Diagramm erfahren Sie, wie die Systemkomponenten zusammenarbeiten, um AMR zu aktivieren.
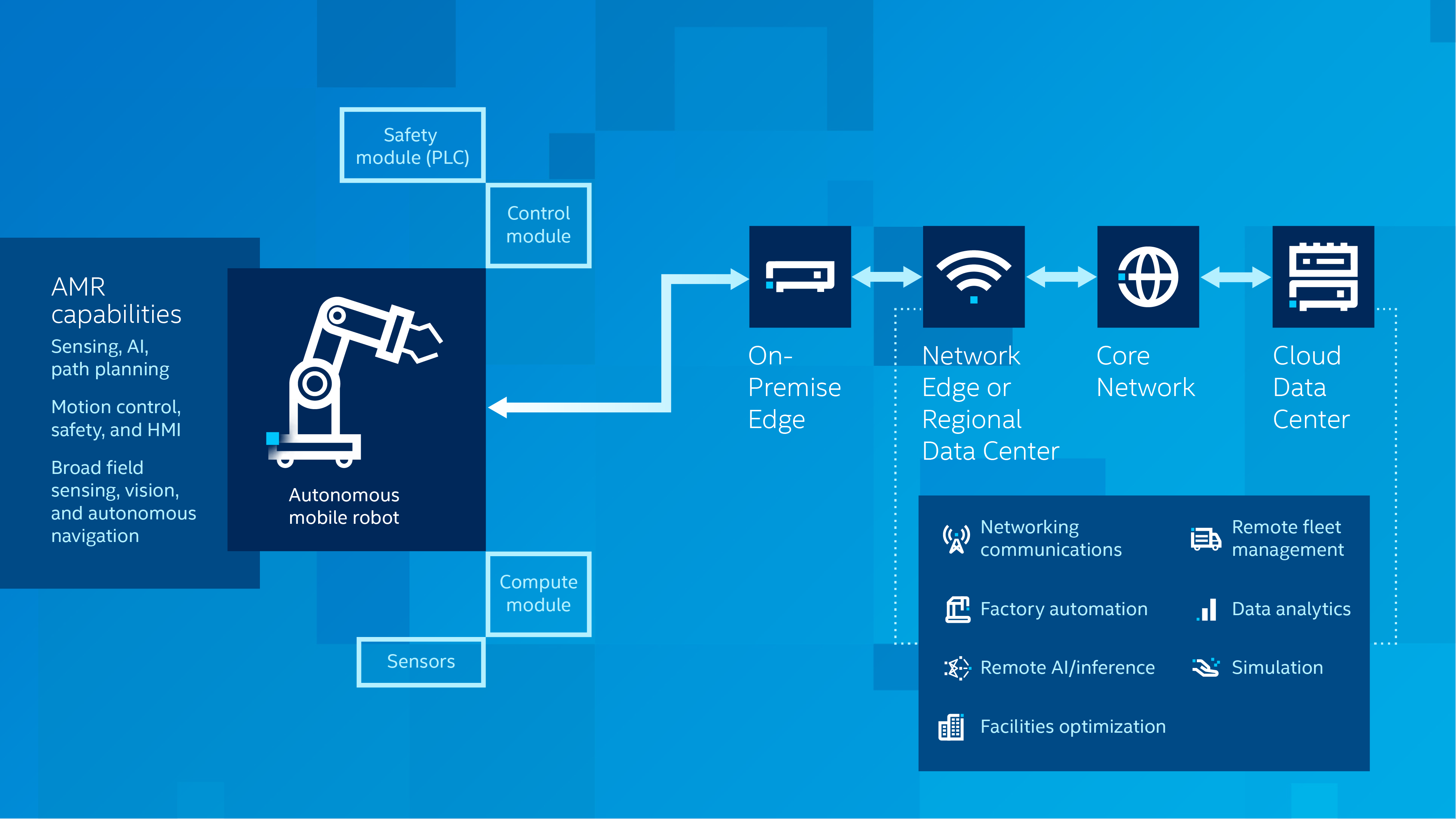{kind=link}
Warum sollten wir autonome mobile Roboter einsetzen?
Verbesserte Sicherheit für Arbeitnehmer
Viele Unternehmen verwenden AMR für Aufgaben, die für menschliche Mitarbeiter schädlich oder unmöglich wären. So können sie beispielsweise zu Vorsorge- und Sicherheitszwecken zur Reinigung und Desinfizierung von Räumen oder zum Transport hochinfektiöser Laborproben in Krankenhäusern eingesetzt werden. In der Industrie können sie schwere Lasten transportieren oder unter extremen Bedingungen arbeiten, in denen Menschen nicht arbeiten können oder dürfen.
Erhöhte Flexibilität
AMR bewerten und reagieren dynamisch auf ihre Umgebung und führen gleichzeitig eine Vielzahl von Aufgaben aus – alles ohne direkte Aufsicht durch einen Bediener. Simultaneous Location and Mapping-Lösungen (SLAM) und fortschrittliche Mapping-Technik ermöglichen es AMR, Änderungen in der Umgebung zu erkennen und sich darauf einzustellen. Diese Flexibilität macht sie zu einem wertvollen Tool, das in einer Vielzahl von Branchen unterschiedlich eingesetzt werden kann.
Verbesserte Effizienz und Produktivität
Damit die Mitarbeiter sich auf wertvolle Aufgaben wie den Kundendienst konzentrieren können, setzen Unternehmen AMR häufig im Lager zum Auffinden, zur Auswahl und zum Transport von Artikeln ein. Wenn es um die Produktivität geht, setzen viele Unternehmen auf Niedrigstrom-AMR, die für ihren Betrieb nur wenig Energie benötigen. Weniger Energieverbrauch heißt, dass die AMR schnell aufgeladen werden und schneller zur Arbeit zurückkehren können, was die Ausfallzeiten reduziert und die Produktion und Auftragsabwicklung aufrechthält.
AMR in Aktion
Entdecken Sie, wie zukunftsweisende Unternehmen AMR in ihren Betrieben auf revolutionäre Weise einsetzen, und informieren Sie sich über die ihnen daraus entstehenden geschäftsverändernden Vorteile.
Betriebliche Effizienz mit beschleunigter Entwicklung und Bereitstellung von AMR steigern
Erfahren Sie, wie das AAEON UP Squared RoboMaker Pro Kit die Entwicklung und den Einsatz von AMR mit allen benötigten, integrierten und vorvalidierten Hardware- und Softwarekomponenten vereinfacht und beschleunigt, einschließlich Intel® RealSense™ Kameras für 3D-Vision und sogar Motoren und Rädern, alles in einem Paket.
Unterstützung von Krankenhäusern mit schnellerer, wirksamerer Desinfizierung
Erfahren Sie, wie das irische Start-up Akara Intel® Technik verwendet, um intelligente, desinfizierende autonome mobile Roboter zu betreiben.
Kundenerlebnis mit mobilen Lieferlösungen verbessern
Erfahren Sie, wie Intel® RealSense™ Tiefenerkennungstechnik Aethon Roboter anleitet, Produkte autonom zu liefern, um das Gasterlebnis zu bereichern: vom Room Service über Essens- und Buffetaufstockung bis zur Bettwäsche.
Industrielle Anwendungsbeispiele von AMR
Fertigung, Bestandshaltung und Logistik
Autonome mobile Roboter werden aufgrund ihrer Vielseitigkeit und ihrer schnellen Integrierung in vorhandene Infrastrukturen schnell zu einem festen Bestandteil der Fertigung, in Lagerhäusern und Logistikunternehmen. Sie können schwere und leichte Lasten bewegen, Artikel an die Mitarbeiter ausliefern und Schutz- und Sicherheitsüberprüfungen durchführen.
Gesundheitswesen
Gesundheitsversorger vertrauen auf AMR für wichtigen Bedarf wie Desinfizierung, Telepräsenz und die Verabreichung von Medikamenten und medizinischen Versorgungsartikeln, wodurch sichere Umgebungen für alle geschaffen werden, in der das Personal mehr Zeit hat, sich um Patienten zu kümmern.
Einzelhandel, Bankwesen und Gastgewerbe
Einzelhändler, Banken und Gastgewerbetreibende verwenden AMR zur Optimierung und Verbesserung des Kundenerlebnisses, vom Kundendienst bis zur Lagerautomation, vom Room Service über Gepäckträger bis zur Wegbeschreibung.
Vernetzte Städte und der öffentliche Sektor
Innovative Städte und Behörden weltweit nutzen das volle Funktionsangebot von AMR. Vernetzte Städte nutzen AMR zur Verbesserung der städtischen Versorgung wie z. B. der Müllabfuhr oder öffentlichen Verkehrsmittel, und Behörden verwenden AMR für Sicherheit, Such- und Rettungsdienste sowie für die Weltraumforschung.
Agrarwirtschaft
Um mit dem erwarteten Bevölkerungswachstum bis 2050 Schritt halten zu können, muss die Welt 50 Prozent mehr Nahrungsmittel produzieren, als wir es gegenwärtig tun.1 Damit dies machbar wird, setzen Agrarbetriebe auf die Unterstützung durch AMR, um einen erheblichen Personalmangel zu kompensieren, die Produktivität zu steigern und den Ertrag zu steigern.
Unterstützung von AMR am Netzwerkrand
Intel bietet Rechenleistung auf Endgeräten, Konnektivität, Echtzeit, Verwaltbarkeit, Sicherheit, KI und Datenspeichertechnik und -lösungen, die Sie benötigen, um Ihre AMR in der Werkhalle oder auf dem Bauernhof, oder wo auch immer Sie ihn einsetzen, in Betrieb nehmen zu können.
Erkenntnisse vom Netzwerkrand für AMR
Erfahren Sie, wie Sie mit unserer zweckmäßig entwickelten, offenen und modularen Software-Entwicklung auf einfache Weise mobile Robotikanwendungen entwerfen, bauen und einsetzen können.
Intel® RealSense™ Produkte
Entdecken Sie die robusten Kameras mit Tiefenerkennung, die es AMRs ermöglichen, ihre Umgebung wahrzunehmen und sich an sie anzupassen, was Funktionen wie Kollisionsvermeidung und die Orientierung anhand von Belegungsplänen ermöglicht.
Intel® Edge-Software-Hub
Beschaffen Sie sich Zugang zu kostenfreien, anpassbaren und einsatzbereiten Software-Paketen, Referenzimplementierungen und einer Vielzahl von Ressourcen und Tools, die Sie bei der beschleunigten Entwicklung und Implementierung von Edge-Computing-Lösungen unterstützen.
Intel® DevCloud for the Edge
Testen Sie Intel® Hardware vor dem Kauf. Diese Online-Sandbox umfasst die neueste Version der Intel® Distribution des OpenVINO™ Toolkits, Intel® Deep Learning Workbench und unsere neuesten CPUs, GPUs, VPUs und FPGAs.
Intel®-Distribution des OpenVINO™ Toolkits
Greifen Sie auf wichtige Tools und vorgefertigte Komponenten zu, um die Entwicklung von KI-Inferenzkapazitäten für AMR zu optimieren.
Entwickeln Sie Roboterlösungen?
Sehen Sie sich unseren wachsenden Katalog an Partnerangeboten für die Entwicklung von End-to-End-Lösungen an. Von Robotern über Edge bis Cloud bieten wir Ihnen Produkte wie Robotik-Entwicklungskits, Software und Hardwarekomponenten.
Häufig gestellte Fragen
Ein autonomer mobiler Roboter (AMR) ist eine Art Roboter, der seine Umgebung versteht und sich ohne direkte Überwachung durch den Bediener oder die Beschränkung auf einen festen, vorbestimmten Pfad durch diese bewegen kann. Alle AMR beginnen mit einer mobilen Plattform, und viele sind mit passiven oder aktiven Anhängen oder Manipulatoren ausgestattet, um eine Vielzahl von Aufgaben ausführen zu können. AMR auf Rädern, die frei von Kabeln und Daten laufen, navigieren über die Kamera, Sensoren, künstliche Intelligenz und maschinelles Sehen.
Ein Beispiel für einen autonomen mobilen Roboter ist ein Pick-and-Place-AMR, der häufig in Lagerhallen eingesetzt wird. Dieser AMR verwendet die Technik des maschinellen Sehens, um Objekte an einem Ort zu ermitteln, an sich zu nehmen und an einen anderen Ort zu bringen und gleichzeitig dabei Hindernisse zu umgehen. Ein weiteres Einsatzbeispiel für einen AMR ist das Krankenhaus, wo er Medikamente oder medizinische Versorgungsgüter transportiert. Dieser AMR unterstützt die Automatisierung der Verabreichung von Medikamenten, indem er Aufträge in Empfang nimmt, die Medikamente abholt und sie im gesamten Krankenhaus zu den richtigen Patienten bringt.
Autonome mobile Roboter (AMR) verwenden Kameras, Sensoren, künstliche Intelligenz und maschinelle Vision, um sich zur Ausführung einer Vielzahl von Aufgaben unabhängig durch unkontrollierte Umgebungen zu bewegen. Autonome gesteuerte Fahrzeuge (AGV) folgen einem Weg oder einer vordefinierten Route, um automatisierte, sich wiederholende Aufgaben auszuführen, und werden häufig von einem menschlichen Bediener beaufsichtigt. Remote-betriebene Unterwasserfahrzeuge (ROV) werden für Aufgaben in tiefen Gewässern eingesetzt, sind jedoch mit der Crew auf einer schwimmenden Plattform verkabelt und werden von ihr gesteuert. ROV können mit Geräten wie einem Robotikarm, einer Kamera, Scheinwerfern oder Sensoren ausgestattet werden, um ihre Fähigkeiten zu verbessern.